ChartWorld and Raymarine Commercial unify to form single commercial navigation brand
Learn more
ECDIS has become the primary navigation tool on merchant vessels, replacing paper charts with a dynamic system that uses user-defined safety parameters—such as safety depth and contour settings—to highlight hazards and trigger alerts. However, incorrect configuration of these parameters, often due to misunderstanding, has led to safety risks, vessel detentions, and even groundings, despite international standards designed to ensure consistent and safe use.
Thursday - 02 October 2025
In recent years, the Electronic Chart Display and Information System (ECDIS) has become the primary navigation tool on merchant vessels worldwide. It has replaced paper charts, offering an integrated and dynamic platform for modern navigation. Among its many functions, the safety parameters – such as safety depth, safety contour, shallow contour, and deep contour – play a critical role in safe navigation. These settings define how ECDIS highlights dangerous depths, draws depth contours, and generates safety alerts.
However, findings from Port State Control inspections and accident investigations often reveal that even experienced navigators may not fully understand ECDIS settings or configure them correctly. As a result, a system intended to prevent navigational incidents can fail to deliver its protective function – and in some cases, may even contribute to accidents. ECDIS-related deficiencies are frequently reported during PSC inspections, and incorrect safety parameter settings can lead not only to vessel detentions, but also to groundings.
In this article, we will explain the most important ECDIS settings – safety parameters.
The transition from paper charts to Electronic Navigational Charts (ENC) was not just a technological upgrade – it marked a fundamental shift in how navigators interact with chart data. Instead of static lines and passively marked depth values, ECDIS introduced dynamic safety parameters that are defined by the user and directly influence how the system displays chart information, triggers alarms, and supports decision-making.
This shift gave rise to key elements such as Safety Contour, Safety Depth, Shallow Contour, and Deep Contour, and Look Ahead settings (in particular time and/or distance to detected danger) to raise alerts which became central to both the visual and logical interpretation of depth and hazard data.
To ensure consistency and safety across different systems and manufacturers, these parameters were standardized through international regulations:
Modern systems like Pathfinder and ChartWorld's eGlobe G2 implement these standards with a strong focus on user experience, offering flexibility and reliability in both navigation and route planning workflows.
Modern ECDIS systems rely on a set of user-defined safety parameters that control how depth information is displayed and when alerts are triggered. All of these parameters are important, but they serve different purposes: some affect only the visual representation of chart data, helping the navigator interpret information more easily, while others have functional significance – they are actively used by the system to assess hazards, validate routes, and trigger alarms, including grounding warnings.
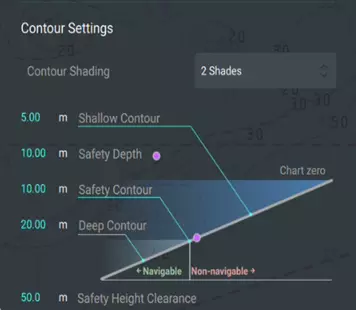
Display of depth-related areas can be adjusted depending on user preference, using one of the following modes:

Parameters with Functional:
In earlier versions of ECDIS, both Safety Contour and Safety Depth were used by the system to evaluate grounding risks and trigger alerts. However, this behavior has evolved. In modern systems such as Pathfinder and eGlobe G2, only the Safety Contour retains its functional role in antigrounding logic. Therefore, we will begin with it.


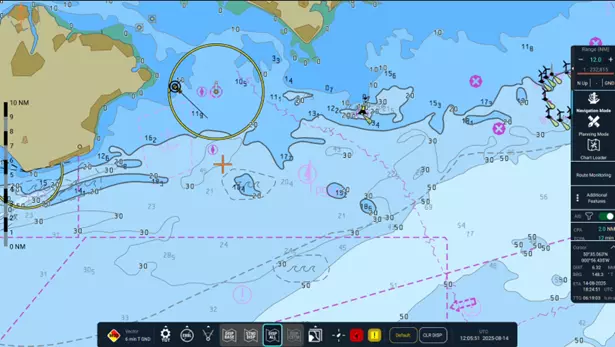
🧭 Safety Contour is the key safety parameter in modern ECDIS systems. It defines the boundary between safe and potentially unsafe waters based on depth. The system selects the nearest available ENC depth contour that is equal to or deeper than the user-defined value. If the exact value is not present in the ENC data, the system automatically selects the next deeper contour to maintain valid safety logic.
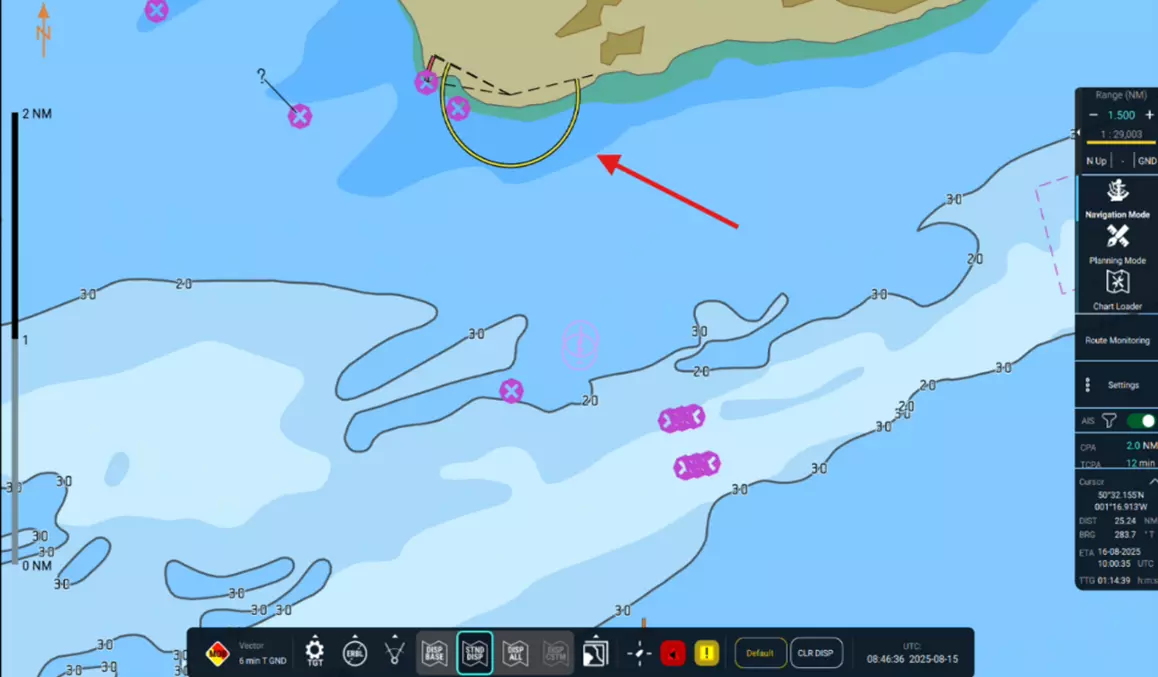
The selected contour is displayed as a bold line on the chart and serves as a reference for both visual interpretation and system logic. ECDIS uses it to assess grounding risks: when the vessel’s route crosses areas shallower than the safety contour, alerts are triggered, and the affected route segments are highlighted in red during the Route Check process. Similarly, the Look Ahead Sector function uses the same logic to visually highlight hazardous zones ahead of the vessel.
In systems like Pathfinder and eGlobe G2, the safety contour is the only depth-related parameter actively used to detect hazards and generate alerts. Other parameters, such as Safety Depth, are primarily used for visual emphasis and do not influence alert logic.
This approach reflects the modern philosophy of ECDIS design: simplifying safety algorithms while maintaining clear and customizable visual cues for the navigator.

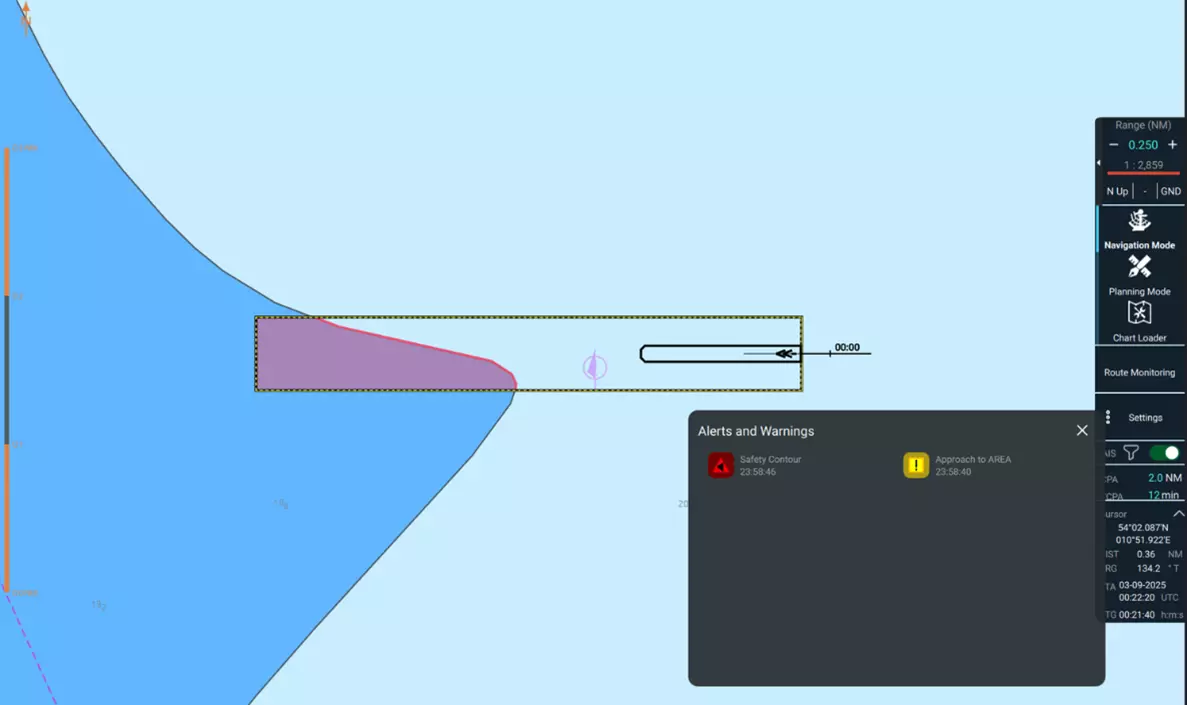
The Safety Contour parameter is more than just a visual boundary between safe and potentially hazardous waters. It serves as the foundation for a range of safety features in modern ECDIS systems. One of the most significant is the Look Ahead Sector function.
This function continuously analyzes chart data within the vessel’s projected path, using the Safety Contour as a reference. If the system detects that the vessel is approaching areas with depths below the defined threshold or areas with special conditions, these areas are highlighted, and the system issues an alert based on the type of threat.
Despite its importance, the Look Ahead Sector function is often underestimated. Its effectiveness directly depends on proper configuration – both of the Safety Contour parameter and the filtering logic that determines which types of zones the system should respond to. In ECDIS settings, certain zone types can be excluded to focus on truly significant threats.
Key Points:
Important: The reliability of the Look Ahead Sector function entirely depends on correct configuration of the Safety Contour and zone filtering. Misconfigurations can lead to missed threats or false alarms.
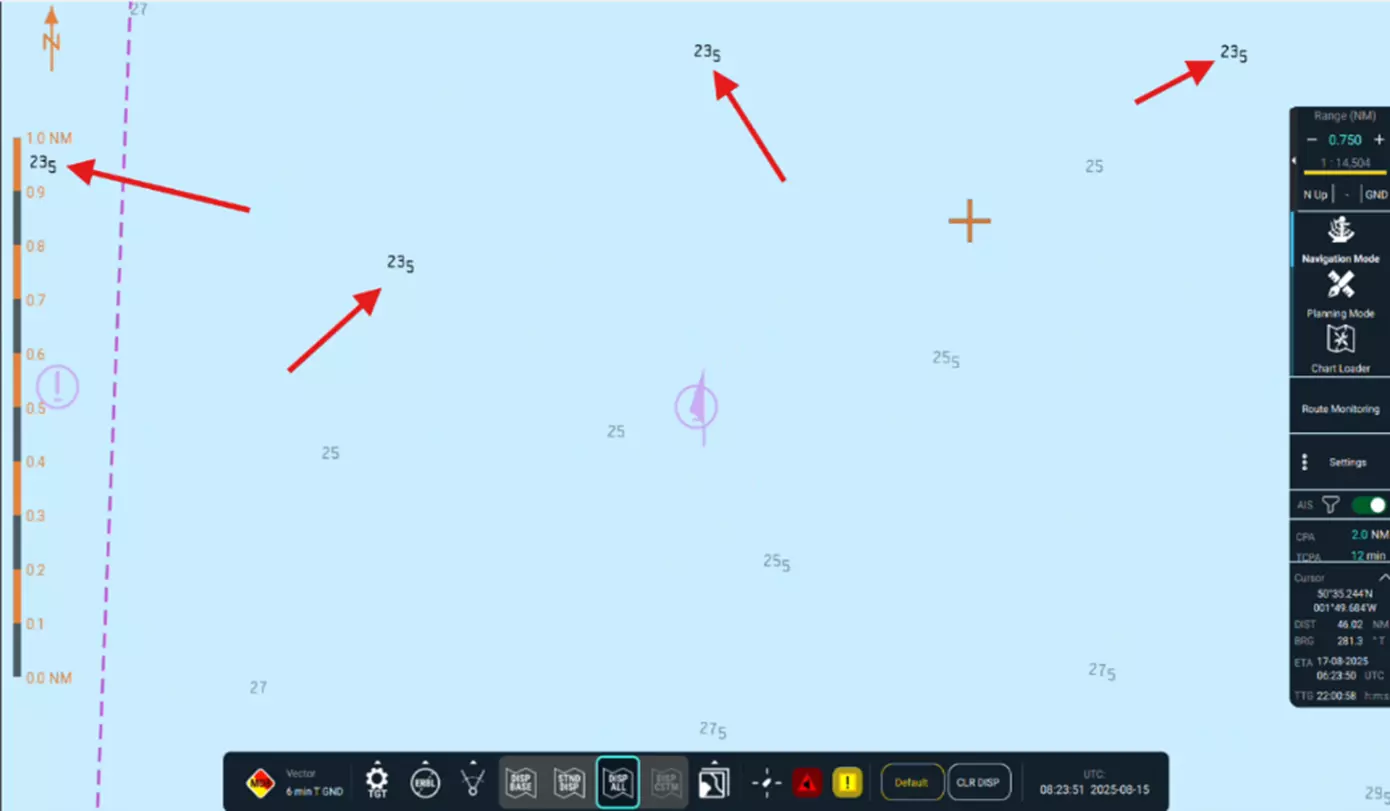
Safety Depth is a user-defined threshold that highlights all depth soundings on the chart that are equal to or shallower than the specified value. Its primary purpose today is to provide a visual cue to the navigator, helping quickly identify areas that may be unsafe for the vessel’s draft.
In earlier generations of ECDIS, Safety Depth was treated on par with Safety Contour in the system’s logic. It was actively used to evaluate grounding risks, validate routes, and trigger alerts.
However, in modern implementations – such as Pathfinder and eGlobe G2 – this has changed. Safety Depth is now a purely visual parameter and no longer influences the system’s internal logic for hazard detection or alerting. It does not trigger alarms or affect route validation.
While it no longer contributes to the system’s safety functions, Safety Depth remains an important part of situational awareness, especially in areas with sparse contour data or when navigating in confined waters. It complements the Safety Contour by offering a more granular view of depth values between contours.
🧭 Shallow Contour is a user-defined visual boundary that highlights very shallow areas considered unsafe for navigation. Typically displayed in darker shades than the Safety Contour, it helps the navigator recognize these areas more easily and improves overall situational awareness. This contour does not affect the system’s alert logic – it is purely visual and intended to support better decision-making during route planning and monitoring.
🧭 Deep Contour defines the boundary of deeper water zones that are generally safe for maneuvering or anchorage. It is often displayed in darker tones and provides a visual reference for deep-water navigation. Like the shallow contour, it does not trigger alerts or affect route validation – its role is entirely visual.

While safety parameters are standardized across ECDIS platforms, the way they are presented and configured may differ.
For example, ECDIS Pathfinder offers advanced contextual visualization by separating NAV and Planning modes. This approach allows the bridge team to view only the information relevant to the current task, enhancing clarity and operational precision.
Separation of Visual Settings
In Pathfinder, visual parameters such as Safety Contour, Safety Depth, Shallow Contour, and Deep Contour are mode-specific:


Once planning is complete, Pathfinder automatically reverts to NAV settings, ensuring consistency and predictable system behavior.
✅ Benefits of Pathfinder’s Approach:
While ECDIS systems offer powerful tools for safe navigation, their effectiveness depends entirely on how they are configured and understood. Incorrect settings – especially for safety parameters – remain one of the most frequently cited deficiencies during Port State Control (PSC) inspections and have contributed to multiple grounding incidents worldwide.
❗ Why Proper Configuration Is Critical
⚠️ Important: Safety parameters must be calculated and applied in accordance with your companies’s approved Safety Management System (SMS). Always refer to company procedures and documentation when configuring ECDIS.
✅ How to Avoid Issues and Groundings
📌 Note: This article outlines general best practices. Always refer to your company’s SMS and flag/state requirements when configuring ECDIS systems.
Understanding how safety parameters work – and how they are implemented in your ECDIS – is essential for confident, compliant, and safe navigation. Whether you're planning a coastal passage or crossing oceans, let your settings reflect not just the vessel’s draft, but the depth of your knowledge.